


Traveling object sensing and tracking utilizing Multiple Webcams
Abstraction— Real clip object sensing and trailing is an of import undertaking in assorted surveillance applications. Nowadays surveillance systems are really common in offices, ATM centres, shopping promenades etc. In this paper, an Automated Video Surveillance system is presented. The system aims at tracking an object in gesture and identifies an object in multiple webcam which would increase the country of tracking. The system employs a fresh combination of Gaussian Mixture Model based Adaptive Background Modeling Algorithm and a RGB colour theoretical account used for placing an object in multiple webcam.
IndexFootings— Traveling object sensing and trailing ; Gaussian Mixture Model ; Adaptive Background Modeling ; colour as a characteristic ; picture surveillance.
I. Introduction
Detection, tracking and placing an individual in existent clip picture has become more and more of import in the field of computing machine vision research. It has many applications, such as pictures based surveillance and human–computer interaction. Its purpose is to turn up marks, retrieve their flights, and maintain their individualities through a picture sequence.
- Related Work
In order to work out the challenging job of human trailing and sensing, a immense figure of surveies are already done related to tracking and sensing of traveling object. [ 1 ] Adaptive Gaussian mixtures have been used for patterning non stationary temporal distributions of pels in picture surveillance applications. Significant betterments are shown on both man-made and existent picture informations. Integrating this algorithm into a statistical model for background minus leads to an improved cleavage public presentation compared to a standard method. In [ 2 ] a method employs a region-based attack by treating two foregrounds resulted from gradient and color-based background minus methods. In [ 3 ] system employs a fresh combination of an Adaptive Background Modeling Algorithm ( based on the Gaussian Mixture Model ) and a Human Detection for Surveillance ( HDS ) System. The HDS system incorporates a Histogram of Oriented Gradients based homo sensor which is good known for its public presentation in observing worlds in still images. [ 4 ] utilizations patterning each pel as a mixture of Gaussians and utilizing an online estimate to update the theoretical account. The Gaussian distributions of the adaptative mixture theoretical account are so evaluated to find which are most likely to ensue from a background procedure. Each pel is classified based on whether the Gaussian distribution which represents it most effectual portion of the background theoretical account. In [ 5 ] a method for human tracking utilizing a stereo camera system called “Subtraction Stereo” and colour information. The tracking system utilizing the minus stereo, which focuses its stereo fiting algorithm to parts obtained by background minus, is realized utilizing Kalman filter. To do the trailing system more robust, the new method besides uses colour information as typical information of individual.
- Our Contribution
In this paper we are implementing an technique which can continuously path and place multiple individual from one or many topographic point utilizing multiple webcam by utilizing adaptative background minus with Gaussian mixture theoretical account technique, handoff the colour as characteristic to place the individual in other webcam.
- Outline
In sec. I we describe about debut, related work and our part to the system. In sec. II we introduce overview of system, frame differencing, Gaussian Mixture Model overview and designation of traveling object. Subsequently, we provide public presentation analysis in sec. III. Finally, in sec. IV we conclude.
II. System Modeling
- Overview of system:
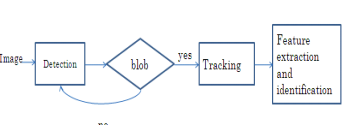
- Flow chart of generalized object sensing and trailing.
The flow chart shows how an image taken from unrecorded webcam is processed for tracking and designation intent. The first procedure is sensing of traveling object for that Gaussian mixture theoretical account is used. Second procedure is to track an moving object for that blob analysis is used, 3rd procedure is designation of traveling object in multiple webcam for that colour characteristic is used and manus off of the characteristic is done between the webcam.
- Frame Differencing
A statistical background image of the picture scene is obtained. This background image is subtracted from the current frame image and threshold. The foreground parts of involvement are extracted from the threshold image after appropriate morphological operations. The algorithm flow for Inactive Background Subtraction is depicted in Fig. 2.
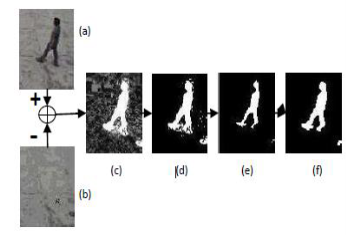
- Inactive Background Subtraction
The Static Background Subtraction system is non resilient to illumination alterations or long permanent alterations in the scene. Hence an Adaptive Background Modeling strategy should be adopted. In the undermentioned treatment, an execution of the Gaussian Mixture theoretical account algorithm is presented, originally formulated by Stauffer et al [ 4 ] , and later modified by Harville et al [ 10 ] .
- Gaussian Mixture Model Overview:
The undermentioned algorithm theoretical accounts each single pel as a mixture of K-3D Gaussian distributions in the colour infinite.
Pixel Value

The chance of detecting the current pel is
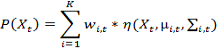 Where K is the figure of distribution
Where K is the figure of distribution is estimation of the weight at
is estimation of the weight at Gaussian in the mixture at clip t. Where
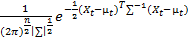
Gaussian in the mixture at clip t. Where is the Gaussian chance denseness map.
is the Gaussian chance denseness map.
 =
=
Where,

 = ( 1-? )
= ( 1-? ) + ?
+ ?
 + ?
+ ?
Where ? is taken as a acquisition invariable. The distributions are sorted harmonizing to the values . The first B distributions are chosen from the screening to stand for the background harmonizing to the undermentioned standards:
. The first B distributions are chosen from the screening to stand for the background harmonizing to the undermentioned standards:
B = argmin ( )
)
The new pel value is classified as a foreground pel if no lucifer is found amongst the B distributions. The least leaden distribution is replaced with the distribution matching to the new pel value.
Preprocessing of an image
Morphologic operations are done by utilizing structuring element square of matrix 5×5 for smoothing the image.
bwareaopen ( binary image, P )
Removes from a binary image all connected constituents ( objects ) that have fewer than P pels, bring forthing another binary image This operation is known as an country gap.
- Designation
BlobAnalysis: The BlobAnalysis object computes statistics for affiliated parts in a binary image
BBOX: computes the bounding box BBOX of the blobs found in input binary image.
centroid: gives the coordinates of the traveling object the co-ordinates are in the signifier ofMeter-by-4 matrix of [ x y width height ] bounding box co-ordinates, whereMeterrepresents the figure of blobs and [ x y ] represents the upper left corner of the bounding box.
- Jumping box as green colour, viridity is the colour ticket as an individuality grade.
Extraction part of involvement from traveling object in this undertaking an individual is being detected by utilizing colour information.so our part of involvement is an little mask of traveling object pull outing its colour information the part of involvement in this undertaking is an little mask of centre portion. By utilizing centroid information we are able to turn up the centre portion of traveling object pull outing a 10×10 matrix colour information.
Region of involvement:

- 10×10 colour mask from the Centre of jumping box
Inserting colour ticket an colour ticket is inserted to the left upper corner of the bounding box as an placing grade to that traveling object.
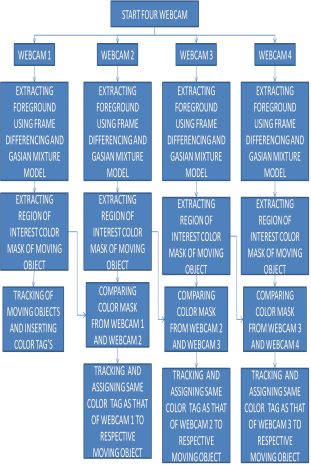
- Flow chart of object sensing and tracking utilizing four Webcam
In this system four webcam are used for placing and tracking two people. A individual is entered foremost in webacm1, this individual is identified by frame differencing and Gaussian mixture theoretical account, and jumping box is made around the foreground object which gives the coordinates of the traveling individual. For pull outing the colour mask we take an 10×10 matrix from the Centre of the bounding box an pull outing the mask presume this individual is tag as ruddy colour in upper left side as an grade of individuality. For 2nd individual we may label a green colour as an individuality grade. The mask are continuously compared with the foreground object and if the mean of difference of two mask is less so threshold so the same colour ticket is given as in webcam1.multiple webcam an multiple individual can be tracked utilizing this method.
III. Performance analysis
The figure below shows tracking of one individual in webcam 2 where the green colour rectangle box is jumping box used to tack the traveling object. left upper corner shows the count and the ruddy colour ticket is inserted at the upper left of the bounding box as an designation grade.
- one individual tracking in webcam2
Same individual is tracked in webcam 1 since both the webcam are placed near to each other and it can be observed that same individual are holding same colour ticket that is green colour.
- trailing of one individual in webcam1
|
Web cam1 |
Mask of figure 8 ( X1 ) |
Mask of figure 8 ( X2 ) |
Mask of figure 8 ( X3 ) |
Mean of difference X1 & A ; X2 |
Mean of difference X1 & A ; X3 |
|
|
|
|
33.0083 |
5.5372 |
|
|
Web cam2 |
Mask of figure 9 ( y1 ) |
Mask of figure 9 ( y2 ) |
Mask of figure 9 ( y3 ) |
Mean of difference Y1 & A ; Y2 |
Mean of difference Y1 & A ; Y3 |
|
|
|
|
39.5041 |
2.6612 |





- two individual tracking in webcam1
- two individual tracking in webcam2
The above figure shows two individual are been tracked in two webcam contineously.in foremost webcam the colour mask are harvest and are compared in 2nd webcam the average difference between the two mask is less than an threshold so same colour ticket is inserted as an grade for designation.
- comparing of colour mask of two individual
The above tabular array shows the comparing of colour mask of two individual. The average difference between each mask is calculated. The average difference between the colour mask of same individual in webcam 1 & A ; 2 is less than 7 and of different individual is greater than 7.which shows that our algorithm works absolutely for tracking of multiple object in multiple webcam.
IV. Decision
The system presented in this paper for Traveling object sensing and tracking in four webcam are successfully performed in matlab2013. This system successfully tracks two people and identifies them in four webcam continuously by infixing tag’s for the several individual. Trailing is done by utilizing Gaussian mixture theoretical account and for designation intent we have used rgb colour information as a characteristic.
REFRENCES
[ 1 ] Dar-Shyang Lee, Member, IEEE, Effective Gaussian Mixture Learning for Video Background Subtraction, IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 27, NO. 5, MAY 2005
[ 2 ] Mohammad Izadi and Parvaneh Saeedi, Robust Region-Based Background Subtraction and Shadow Removing Using Color and Gradient Information
[ 3 ] Prithviraj Banerjee and Somnath Sengupta: Human Motion Detection and Tracking for Video Surveillance
[ 4 ] Stauffer, C. and Grimson, W.E.L, Adaptive Background Mixture Models for Real-Time Tracking, Computer Vision and Pattern Recognition, IEEE Computer Society Conference on, Vol. 2 ( 06 August 1999 ) , pp. 2246-252 Vol. 2
[ 5 ] Yuma Hoshikawa, Kenji Terabayashi, Kazunori Umeda, Human Tracking Using Subtraction Stereo and Color Information
[ 6 ] . Beymer, D. and Konolige, K. , “Real-Time Tracking of Multiple People Using Continuous Detection” ,Proc. Of the seventh Int. Conf. on Computer Vision Frame-rate Workshop, 1999.
[ 7 ] Bhattacharyya, A. , “On a step of divergency between two statistical populations defined by chance distributions” , Bull. Calcutta Math. Soc. , Vol.35, pp.99–109, 1943.
[ 8 ] Schiele, B. , et al. , “Visual People Detection-Different Models, Comparison and Discussion”, Proc. of the IEEE ICRA2009 Workshopon Peoples Detection and Tracking, pp.1-8, 2009.
[ 9 ] Umeda, K. , et al. , “Subtraction Stereo -A Stereo Camera System That Focuses On Traveling Regions -” ,Proc. Of SPIE-IS & A ; T ElectronicImaging, Vol.7239 Three- Dimensional Imaging Metrology, 723908, 2009.
[ 10 ] M. Harville, G. Gordon, and J. Woodfill, “Foreground Segmentation utilizing adaptative mixture theoretical accounts in colour and depth” , InProceedings ofthe IEEE workshop on Detection and Recognition of Events in Video, 2001.
